

කාලෙකට පස්සේ බ්ලොග් එකට ලියන්න හිතුනේ Gooleලගේ අලුත්ම වැඩක් ගැන. මේකට කියන්න google cardboard කියල. ''සරල, විනෝදාත්මක, අඩුවියදම් ත්රිමාණ සජීවිකරණ අත්දැකීමක්'' කියන අර්ථ දැක්වීම තමය googleල මේකට දීල තියෙන්නේ.
කාඩ්බෝඩ් පෙට්ටියක් ඇතුලේ දාපු කාච දෙකකින් ස්මාට් එකෙන් 3D බලන්න පුළුවන් අලුත්ම වැඩක්. ගිය අව්රුද්දෙ අග තමා මේ තාක්ෂනය එලියට අවේ. ඉතින් උණු උණුවෙම මේ ගජ්ජෙට් එක ගෙදරදීම හදන හැටි කියල දෙන්න තම මේ ලිපිය ලියන්නේ.
මේ තියෙන්නේ මේක වැඩ කරන ෆෝන් ලැයිස්තුව
- Google Nexus 4,5 and 6
- Motorola Moto X
- Samsung Galaxy S4 and S5
- Samsung Galaxy Nexus
- Apple iPhone 4, 4S, 5, 5C + 5S
- HTC Eco 3D, One (Mini, S, X, X+), Sensation, Sensation XE, Velocity 4G
- Huawei Ascend G 615 + P1
- iOcean X7
- LG G2, Optimus 3D Max (P720), Optimus 4X HD (P880), Optimus G (E975), Optimus G Pro + P940 S
- Sony Xperia S, SP, T + Z1
මේ ලිස්ට් එක අන්තර්ජාලයෙන් හොයාගත්තේ අගල් 5ක තිරයක් හොද resolution තියන වේගවත් ඕනේ ෆෝන් එකක් එක්ක මේක වැඩ කරයි කියල හිතනවා
මෙන්න බඩු ලිස්ට් එක-
- හොද කාඩ්බෝඩ් එකක් වර්ග අඩි 1 1/2 ( ඝනකම වැඩි කාඩ්බෝඩ් එකක් ගන්න එපා, මම ගත්තේ Pizza box එකක් එකේ ඝනකම 2.3mm වගේ )
- අත් කාච 2ක් (එක සමාන පොඩි කාච දෙකක්)
මුලික පියවර -
මුලින්ම www.google.com/get/cardboard/get-cardboard ගිහින් මේ සැලැස්ම බාගන්න.
බාගත්ත ෆයිල් එක ඇතුලේ තියන PDF එක A4 වල ප්රින්ට් කරගන්න. දැන් ඒ ප්රින්ට් කරපු කොළ ටික කාඩ්බෝඩ් එකේ පරිස්සමට අලවගන්න.

මෙන්න මෙතැන තමා ටිකක් අමාරු වැඩටික තියෙන්නේ. කලින් අපි ගත්තේ අපිට ලේසියෙන් හොයාගන්න පුළුවන් කාච 2ක් නේ, ඒ උනාට ඇත්තටම මේ වැඩේට ඕන වෙන්නේ 45mm නාභිදුර තියන කාච 2ක් :D එහෙම කාචදෙකක් ලේසියෙන් හොයාගන්න බැරි නිසා අපි අපේ කාච වලට ගැලපෙන විදියට මේ පෙට්ටියේ පොඩි වෙනස්කම් ටිකක් කරගමු.
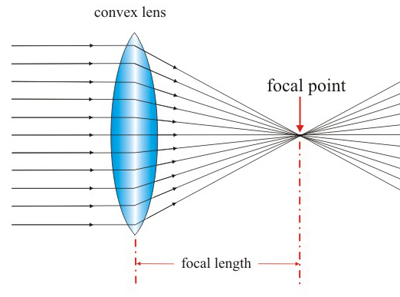 මෙන්න මේ සැකැස්මට ගැලපෙන විදියට තම අපි අපේ පොට්ටිය හදාගන්න ඕනේ. ඒ කියන්නේ අපේ කාච වල නාභිදුරට ගැලපෙන්න අපේ ෆෝන් එක තියන දුර වෙනස් කරගනන් ඕනේ. Google එකෙන් අපි ගත්ත සැලැස්මට අනුව නම් ඒ කියන්නේ 45mm නාභිදුර තියන කාච 2ක් ගත්තොත් 43mm දුරකින් ෆෝන් එක තියන්න ඕනේ මේක වැඩ කරන්න.
මෙන්න මේ සැකැස්මට ගැලපෙන විදියට තම අපි අපේ පොට්ටිය හදාගන්න ඕනේ. ඒ කියන්නේ අපේ කාච වල නාභිදුරට ගැලපෙන්න අපේ ෆෝන් එක තියන දුර වෙනස් කරගනන් ඕනේ. Google එකෙන් අපි ගත්ත සැලැස්මට අනුව නම් ඒ කියන්නේ 45mm නාභිදුර තියන කාච 2ක් ගත්තොත් 43mm දුරකින් ෆෝන් එක තියන්න ඕනේ මේක වැඩ කරන්න.

මේ තියෙන්නේ සාමාන්ය google cardboard box එකක් ඒ කියන්නේ 45mm නාභිදුර තියන කාච 2කින් හදපු එකක්. මෙතන පෙන්නලා තියනවා සාමාන්ය විදියට කාචවල සහ ෆෝන් එක අතර දුර කොහොමද කියලා, බොහෝවිට අපිට මිට වැඩිය වැඩි දුරක් ඕනේවෙයි පැහැදිලිව පෙන්නනම්.(මොකද මේකට පහසුවෙම්ම හොයගන්න වෙන්නේ අත්කාච 2ක්, ලංකාවේ මෙච්චර පොඩි අත්කාච හරිම දුර්ලබයි.)
අපි බලමු කොමද මේ නිවැරදි දුර හොයාගන්නේ කියලා
අපි බලමු කොමද මේ නිවැරදි දුර හොයාගන්නේ කියලා
මුලිම්ම Google Play Store එකට ගිහින් official google cardboard app එක හෝ වෙන google cardboard game එකක් බාගන්න. official google cardboard app එකේ 150MB වගේ තියනවා ඒ නිසා wifi connection එකක් පාවිච්චි කරලා බාගන්න.
දැන් ඒ app එකක් ON කරලා කාච දෙක ඇහැ ලගට කරලා පැහැදිලිව පෙනකම් ෆෝන් එක ඈත්කරන්න. මේ වැඩේ පරිස්සමෙන් කරලා හරියටම කාච දෙක සහ ෆෝන් එක අතර දුර මැනගන්න. මං පාවිච්චි කරපු කාච වලට අනුව නම් 101mmක පරතරයක්ඇති උනා. (මේ ගන්න පරතරය 125mm කට වැඩිය වැඩි උනොත් නම් ගජ්ජෙට් එකේ පැහැදිලිබව ටිකක් අඩුවෙයි. )
දැන් ඒ app එකක් ON කරලා කාච දෙක ඇහැ ලගට කරලා පැහැදිලිව පෙනකම් ෆෝන් එක ඈත්කරන්න. මේ වැඩේ පරිස්සමෙන් කරලා හරියටම කාච දෙක සහ ෆෝන් එක අතර දුර මැනගන්න. මං පාවිච්චි කරපු කාච වලට අනුව නම් 101mmක පරතරයක්ඇති උනා. (මේ ගන්න පරතරය 125mm කට වැඩිය වැඩි උනොත් නම් ගජ්ජෙට් එකේ පැහැදිලිබව ටිකක් අඩුවෙයි. )
හරි, දැන් අපි ගත්ත මිමි වලට අනුව අර කලින් ප්රින්ට් කරලා අලවගත්ත සැලැස්ම ටිකක් වෙනස් කරගන්න වෙනවා.



අපිට අවශ්ය ගානට බ්ලොක් එකේ දිග වෙනස් කරගත්තට පස්සේ, මේ කලි වෙන වෙනම කපල එකට එකතු කරන්න. වැඩේ අමාරු නම් Youtube වීඩියෝ එකක් උදව් කරගන්න.




















