
රොබෝ තාක්ෂණයේ මුලික ප්රවේශය 2 ලිපියෙන් අපි බලාපොරොත්තු වන්නේ රොබෝ තාක්ෂණයේ ඉදිරියට යාමේදී අපට අවශ්යවන විවිද සංවේදක පිළිබද මුලික හැදින්වීමක් කිරීමටයි. project එකක් කිරීමේදී අපට අපගේ අවශ්යතාවයට ගැලපෙන සංවේදක නොදැන සිටීම අප හැම දෙනාටම පොදු ගැටළුවක්. ඒ නිසයි මෙවැනි ලිපියක අවශ්යතාවය මතු වුනේ.
පළමුව සංවේදකයක් යනු කුමක්ද කියා බලමු. සරලම ආකාරයට ගත්කල සංවේදකයක් යනු යම් භෞතිකමය වෙනස් වීමක් හදුනාගත හැකි හෝ එසේ හදුනාගෙන එයට ප්රතිචාර දැක්වීමට සමත් උපකරණයකි.
(A device that detects or measures a physical property and records, indicates, or otherwise responds to it.)
මේවන විට ලෝකයේ විවිද අවශ්යතා මුල් කරගෙන විවිධ සංවේදක විශාල ප්රමාණයක් නිපදවා ඇත.
List of sensors
1.පෙර ලිපියේද සදහන් කල Ultrasonic distance sensor(wiki/Ultrasonic_sensor) එක ගැන බලමු. මෙය අන්තර්ජාල වෙලදපොලේ $2 ක් වැනි මුදලකට මිලදී ගත හැකි උපකරණයකි. මෙය මුලිකවම වව්ලේක් විසින් ගමන් මාර්ගය සොයා ගැනීමට බවිත කරන තාක්ෂණයට සමානවේ. මෙමගින් අපට ඉදිරියෙන් ඇති බාදක හදුනා ගැනීම ,එය ඇති දුර නිගමනය කිරීම,වැනි කාර්යන් සදහා භාවිත කල හැක.

2.අධෝරක්ත සංවේදක පැනලය නිර්මාණය කිරීමේදී භාවිත කල සංවේදක පිලිබදව හදුනා ගනිමු. මෙහෙදී අපට විවිද වර්ණ හදුනාගැනීමට හැකිවෙනවා. විශේෂයෙන් කළු හා සුදු ප්රධාන වශයෙන් වෙන් කර හදුනා ගැනීමට පුළුවන්. මෙහි ඇති අධෝරක්ත ඩයෝඩය මගින් නිකුත් කරන ආලෝකය යම් පෘෂ්ටයක ගැටීමෙන් පරාවර්තනය වී යලි ග්රාහකය මගින් ලබා ගනී ,විවිද වර්ණ ආලෝකය පරාවර්තනය කිරීම විවිද පරසවලින් සිදුකරණ නිසා පහසුවෙන් වර්ණ වෙන් කර ගැනීමට පහසුවේ.
Color Detection Sensor
Sharp IR range Finder




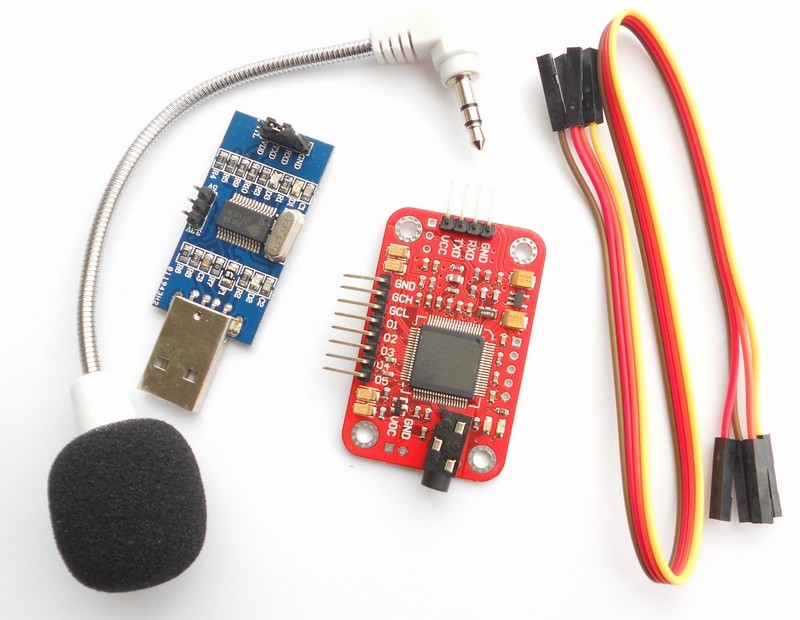
3.voice recognition sensor කටහඩට සංවේදී මෙම සංවේදකය මගින් අප ලබාදෙන විදාන වලට ප්රතිචාර දක්වයි.මෙය තරමක් මිල අදික සංවේදකයකි සාමාන්යෙන් මෙය $30 සිට $50 පමණ වෙනවා.
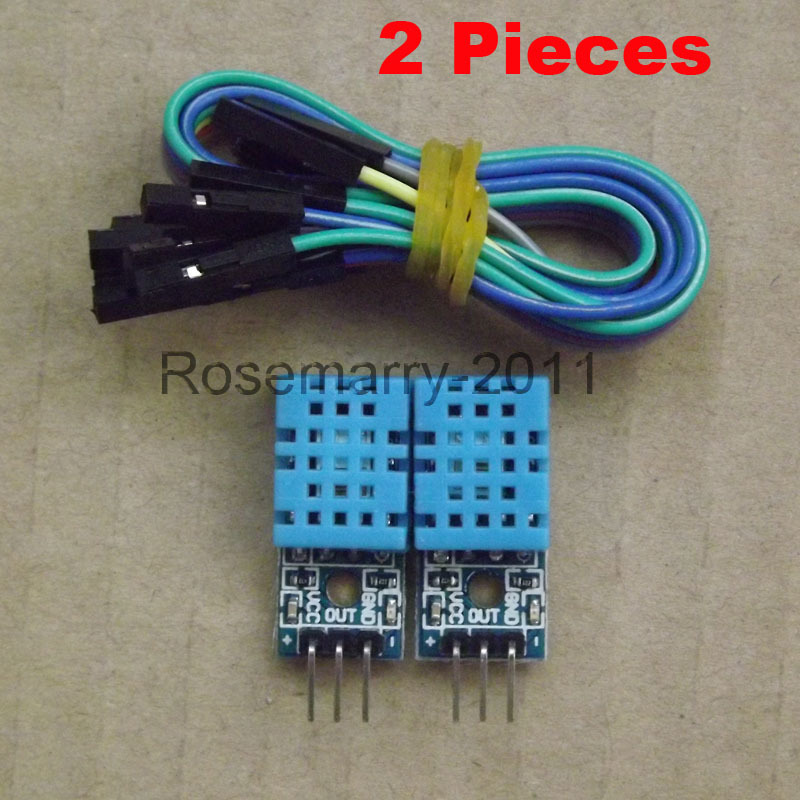
4.Motion sensors -මෙමගින් අපට විවිධ චලන හදුනා ගැනීමට හැකි වෙනවා.බොහෝවිට මෙවැනි සංවේදක ආරක්ෂක පද්ධති සදහා භාවිත කරයි. පරිසරයේ සිදුවන චලන ,දෙදරීම් , පිහිටීම් වෙනස් වීම් හදුනා ගැනීමට මෙය වැදගත් වේ. මෙහි ඇති විශේෂත්වය නම් මෙය ආවරණය වන පරාසය (Range) තුලට පුද්ගලයෙකුගේ පැමිණීම හෝ පුද්ගලයෙකුගේ පිටවීම වෙන් කර හදුනා ගැනීමට පුළුවන් .මෙවැනි සංවේදක මිල අඩු ,අඩු ශක්ති පරිභෝජන උපකරණයක් නිසා බොහෝ නිවාස,කාර්යාල වල මෙවැනි සංවේදක භාවිත කරයි .


V1YsBRrr3lWI9w~~60_12.JPG)
5.Alcohol Gas Sensor -මෙමගින් මද්යසාර වාෂ්ප හදුනාගැනීමට ප්රයෝජනවත් වේ. ආරක්ෂක අංශ රියදුරන් පරික්ෂා කිරීමේදී රියදුරා මද්යසාර භාවිත කර තිබේද නැද්ද යන වග පරික්ෂ කිරීමට මෙවැනි සංවේදක යොදාගනී.

8E9s4l6cOwBRVl45bo)g~~60_12.JPG) ඇමෝනියා,සල්ෆර්,බෙන්සීන්,හා අනිකුත් හානිකර වායුන් පහුසුවෙන් හදුනාගැනීමට මෙයට හැකියාව ඇත.10-1000ppm දක්වා මෙය සංවේදී බව දක්වයි.
ඇමෝනියා,සල්ෆර්,බෙන්සීන්,හා අනිකුත් හානිකර වායුන් පහුසුවෙන් හදුනාගැනීමට මෙයට හැකියාව ඇත.10-1000ppm දක්වා මෙය සංවේදී බව දක්වයි. BRh2m!eF-Q~~60_12.JPG)




ආරක්ෂක පද්දති සදහා මෙවැනි සංවේදක වැදගත් වේ .පද්දතියක මුර පදය (Passward) එක වෙනුවට මෙවැනි ක්රම යොදාගැනීම පද්දතියේ ආරක්ෂාවට උපකාරී වේ .




















































{kind=link}